_아침독서상단(1).jpg)
.jpg) |
.jpg) |
.jpg) |
|
[GT] 자율주행에 도움이 되는 물체 식별 시스템 개발 | |||
| 2020년 6월 16일, 컴퓨터 비전(Vision) 딥러닝 분야 최고 수... |
  |
 |  |
자율주행에 도움이 되는 물체 식별 시스템 개발
어떤 신기술이 세상을 극적으로 변화시킬까? 세계 최고의 연구소에서 나오는 놀라운 혁신을 독점 소개합니다.
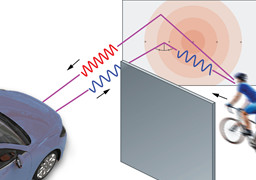
2020년 6월 16일, 컴퓨터 비전(Vision) 딥러닝 분야 최고 수준 학회 CVPR(Conference on Computer Vision and Pattern Recognition, 컴퓨터 비전 및 패턴 인식 컨퍼런스)에서 발표 된 한 연구는 자동차, 자전거, 보행자를 포함하는 사물을 구별하고, 그 방향과 다가오는 속도를 – 심지어 모퉁이에서 나오는 사물까지도 - 측정할 수 있는 시스템을 소개했다. 이 접근 방식을 사용하면 실제 자율 주행 시나리오에서 기존의 한 방향 시각 센서를 통해 보행자와 자전거를 포착하기 전에, 이 시스템을 통해 그들에 대한 사전 충돌 경고가 가능해진다.
이 연구는 프린스턴 대학에서 시작되었고, 초기 연구에서 연구팀은 빛을 사용하여 모퉁이에 숨은 사물을 확인했다. 그러나 이러한 시도는 현재의 자동차에 활용하기에는 실용적이지 않았다. 고출력 레이저가 필요하고 적용 거리도 짧게 제한되기 때문이다.
이에 초기 연구를 수행한 이 연구팀은 가시광선 대신 이미징(imaging) 레이더를 사용하여 자동차의 시선에서 벗어난 위험을 감지하는 시스템을 만들 수 있는지 고민했다. 매끄러운 표면에서의 신호 손실은 레이더 시스템의 경우 훨씬 낮으며 레이더는 물체 추적을 위한 입증된 기술이다. 문제는 레이더의 공간 해상도 - 자동차 및 자전거와 같은 모퉁이 주변의 사물을 촬영하는 데 사용됨 - 가 상대적으로 낮다는 것이다. 하지만 다행히도 연구팀은 센서가 작동할 수 있도록 레이더 데이터를 해석하는 알고리즘을 만들었다.
이들이 개발한 알고리즘은 매우 효율적이며 현 세대의 자동차 하드웨어 시스템에 적합하다. 따라서 우리는 차세대 차량에서 이 기술을 볼 수 있을지도 모른다.
시스템이 사물을 구별할 수 있도록 연구팀은 표준 레이더가 유용한 정보가 아닌 배경 소음으로 간주하는 레이더 신호의 일부를 처리했고, 인공지능 기술을 적용하여 동일 프로세스를 개선하고 이미지를 읽을 수 있도록 했다. 이를 위해 시스템을 실행하는 컴퓨터는 매우 적은 양의 데이터로 자전거와 보행자를 인식하는 방법을 학습해야 했다.
우선, 무엇이 그곳에 있는지를 감지해야 한다. 그리고 무엇이 그곳에 있으면, 시스템은 ‘그것이 중요합니까?’라고 묻게 된다. 즉, ‘자전거입니까, 보행자입니까?’를 묻고, 이후 그것의 정확한 위치를 찾아내야 한다.
이 시스템은 현재 보행자와 자전거를 감지하는 데 우선순위를 두는데, 이는 엔지니어들이 그러한 것들이 가장 도전적이고 까다로운 과제라고 여기기 때문이다. 우선 크기가 작고, 어떤 특정 틀에 얽매이지 않는 모양을 지니며 동작 또한 다양하기 때문이다. 이를 개선하면, 자동차는 쉽게 감지되도록 시스템이 조정될 수 있다.
연구팀은 레이더와 신호 처리 개선을 포함하는 다각도의 적용 방안에 대한 연구를 진행할 계획이다. 이 시스템은 자동차 안전을 획기적으로 향상시킬 수 있는 잠재력을 가지고 있다. 물론 상용화 이전에, 이 기술은 매우 엄격한 자동차개발 주기를 거쳐야한다. 각 기기와 통합되고 시장에 출시하기까지, 여전히 많은 엔지니어링 과정을 필요로 한다. 그러나 원천 기술이 확보되었기 때문에, 우리가 곧 자동차에서 이 기술과 만나볼 수 있을 확률이 높다.
- Princeton University, Engineering School, June 24, 2020, “New Radar Lets Cars Spot Hazards Around Corners,” by John Sullivan. © 2020 The Trustees of Princeton University. All rights reserved.
- To view this article, please visit:
https://engineering.princeton.edu/news/2020/06/24/new-radar-lets-cars-spot-hazards-around-corners